qemu的学习
qemu搭建arm开发环境
第一部分
第一步
Windows下QEMU安装文件:链接:https://pan.baidu.com/s/1mLw4pqdp9Q8JxYkrXRfbbg 提取码:3qq4
下载上述两个文件,并安装QEMU后,运行如下命令:
1 | "C:\Program Files\qemu\qemu-system-arm.exe" -M versatilepb -m 16 -kernel vmlinuz-qemu-arm-2.6.20 -append "clocksource=pit quiet rw" |
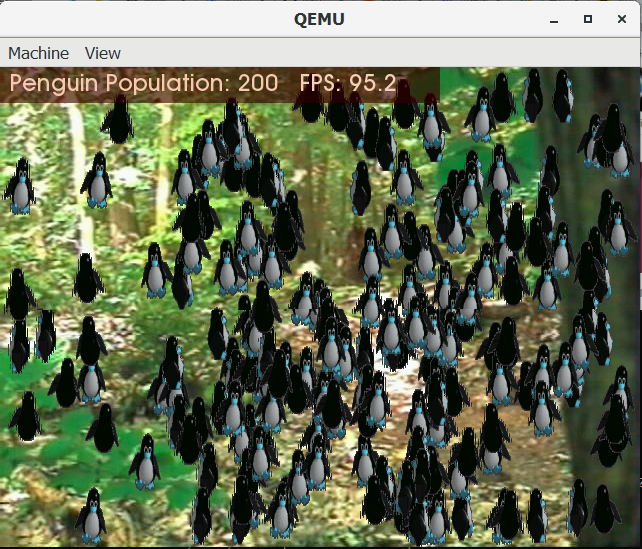
一堆企鹅
第二步
ubuntu 18 文件系统下载地址如下:链接:https://pan.baidu.com/s/1qYmiqvL6nPx3LY8gDIylIw 提取码:68lc
内核与DTB文件下载地址如下:链接:https://pan.baidu.com/s/1WmRMtAxddu69SbaUqRma8Q 提取码:up22
下载上述文件,解压缩文件系统,和内核文件以及DTB文件放在同一个目录,然后运行如下命令:
1 | "C:\Program Files\qemu\qemu-system-arm.exe" -M vexpress-a9 -m 1024M -kernel zImage -dtb vexpress-v2p-ca9.dtb -append "root=/dev/mmcblk0 rw console=ttyAMA0" -sd rootfsubuntu18lxde.ext3 -serial stdio -smp 4 |
结果
第二部分
第一步
启动ubuntu
用户cxy 密码123456
结果
第二步/这部分根据实际情况
建立文件夹并解压缩gcc文件
1 | cxy@ubuntu:~/Desktop/src$ ls |
下载成功后,解压缩,然后将opt/TuxamitoSoftToolchains/arm-arm1176jzfssf-linux-gnueabi/gcc-4.6.4下的所有文件复制到新建的目录/usr/local/arm/gcc-4.6.4/下面.
1 | sudo mkdir /usr/local/arm/gcc-4.6.4/ |
第三步
配置环境变量
1 | export PATH=$PATH:/usr/local/arm/gcc-4.6.4/bin |
第四步
执行命令
1 | arm-none-linux-gnueabi-gcc --version |
若出现下面,则成功。
1 | arm-none-linux-gnueabi-gcc (crosstool-NG hg+unknown-20130521.154019 - tc0002) 4.6.4 |
已成功实现

第五步:下载编译内核部分
内核下载官网:https://www.kernel.org/,我选择了linux-4.4.229这个版本,你也可以选择其他版本,其他版本的编译过程也是类似的.如果官网下载比较慢的话,可以从下面这里下载:
使用命令tar xvf linux-4.4.229.tar.xz解压缩
进入解压后目录
1 | $ls arch/arm/configs/ |
上面为支持的内核
versatile_defconfig和vexpress_defconfig都是比较常见的qemu支持的内核版本
在解压内核的根目录,执行如下命令来配置内核将要编译的平台:
make vexpress_defconfig
根据你安装的交叉编译器的版本,执行如下命令开始编译内核:
ARM=arm CROSS_COMPILE=arm-linux-gnueabi- make -j16
或者
ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- make -j16
上述命令中ARCH=arm是指定编译的CPU架构是arm,而CROSS_COMPILE=arm-none-linux-gnueabi是指定交叉编译工具,最后的-j16是使用16个线程进行编译,通常选择你当前电脑CPU数量的二倍.
没有出现提示错误一般就编译成功了,常见编译后会出现类似如下的信息:
AS arch/arm/boot/compressed/piggy.gzip.o
LD arch/arm/boot/compressed/vmlinux
OBJCOPY arch/arm/boot/zImage
Kernel: arch/arm/boot/zImage is ready
成功完成
第六步用QEMU启动内核
内核文件arch/arm/boot/zImage就是我们最后编译成功的内核文件.我们来尝试启动一下这个内核.命令中-M指定内核运行的平台,-m指定内存大小,-kernel指定内核文件,-dtb指定设备树定义文件.
qemu-system-arm -M vexpress-a9 -m 512M -kernel arch/arm/boot/zImage -dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb
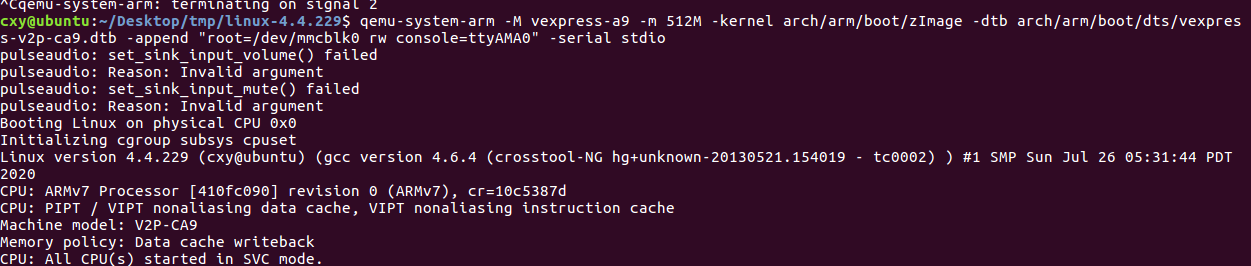
使用如下命令来指定内核日志输出的端口.其中-append指定内核启动的参数(后续在uboot启动的时候,也可以在uboot指定这个参数,我们在这里把内核输出console指定到了ttyAMA0这个串口),-serail设定串口转发到host机标准输入输出控制台(也就是你当前打命令的地方)
qemu-system-arm -M vexpress-a9 -m 512M -kernel arch/arm/boot/zImage -dtb arch/arm/boot/dts/vexpress-v2p-ca9.dtb -append “root=/dev/mmcblk0 rw console=ttyAMA0” -serial stdio
第三部分(24日下午)
第七步busybox下载与编译
官方下载地址:https://busybox.net/downloads/,我们选择下载了busybox-1.21.0.tar.bz2
如果下载比较慢可以从这里下载:
下载后首先解压缩:
tar xjf busybox-1.21.0.tar.bz2
解压完成后,进入解压缩后的目录执行下面命令完成最初基本配置
make defconfig ARCH=arm
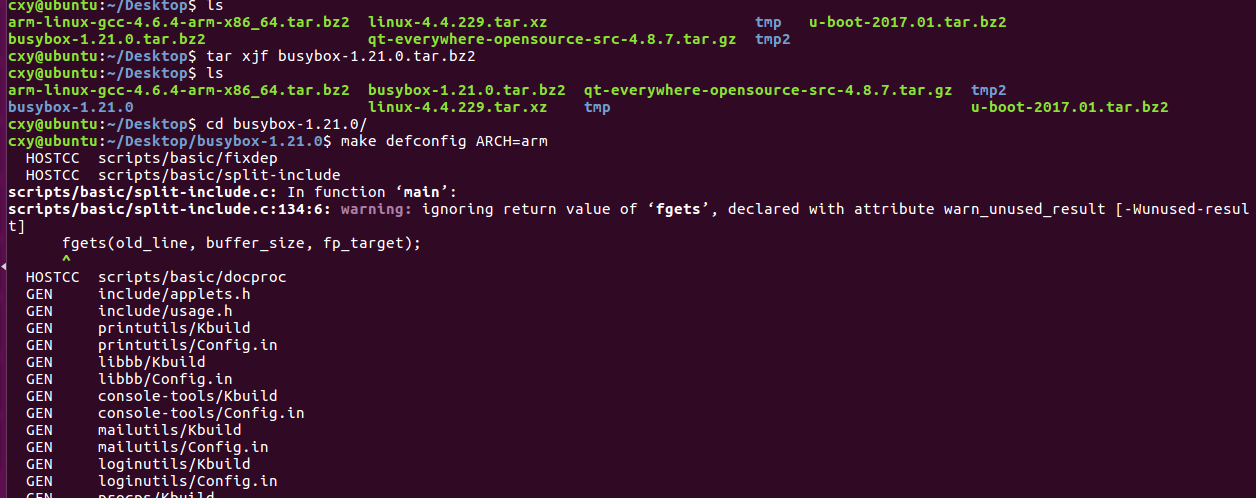
运行成功后,当前目录会出现一个.config的文件.为了日后运行方便,我们需要手工改成静态编译
你可以直接编辑.config将# CONFIG_STATIC is not set这句话改为CONFIG_STATIC=y

再执行如下命令进行编译:
ARCH=arm CROSS_COMPILE=arm-none-linux-gnueabi- make install
成功

第八步做一个文件系统
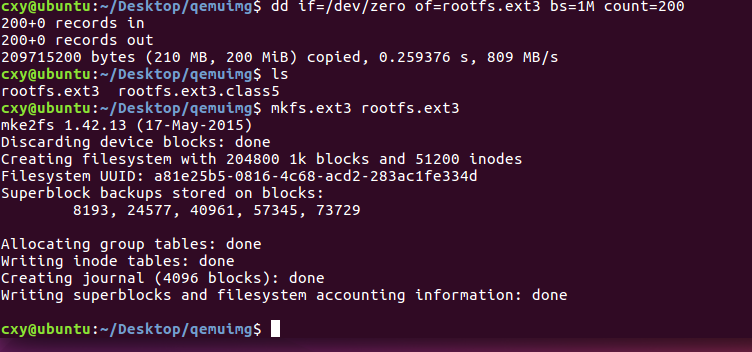
做一个最简单的文件系统image
1 | dd if=/dev/zero of=rootfs.ext3 bs=1M count=200 |
这个rootfs.ext3就是最简单的文件系统image了.
成功
第九步QEMU启动内核加BusyBox
运行下面的命令
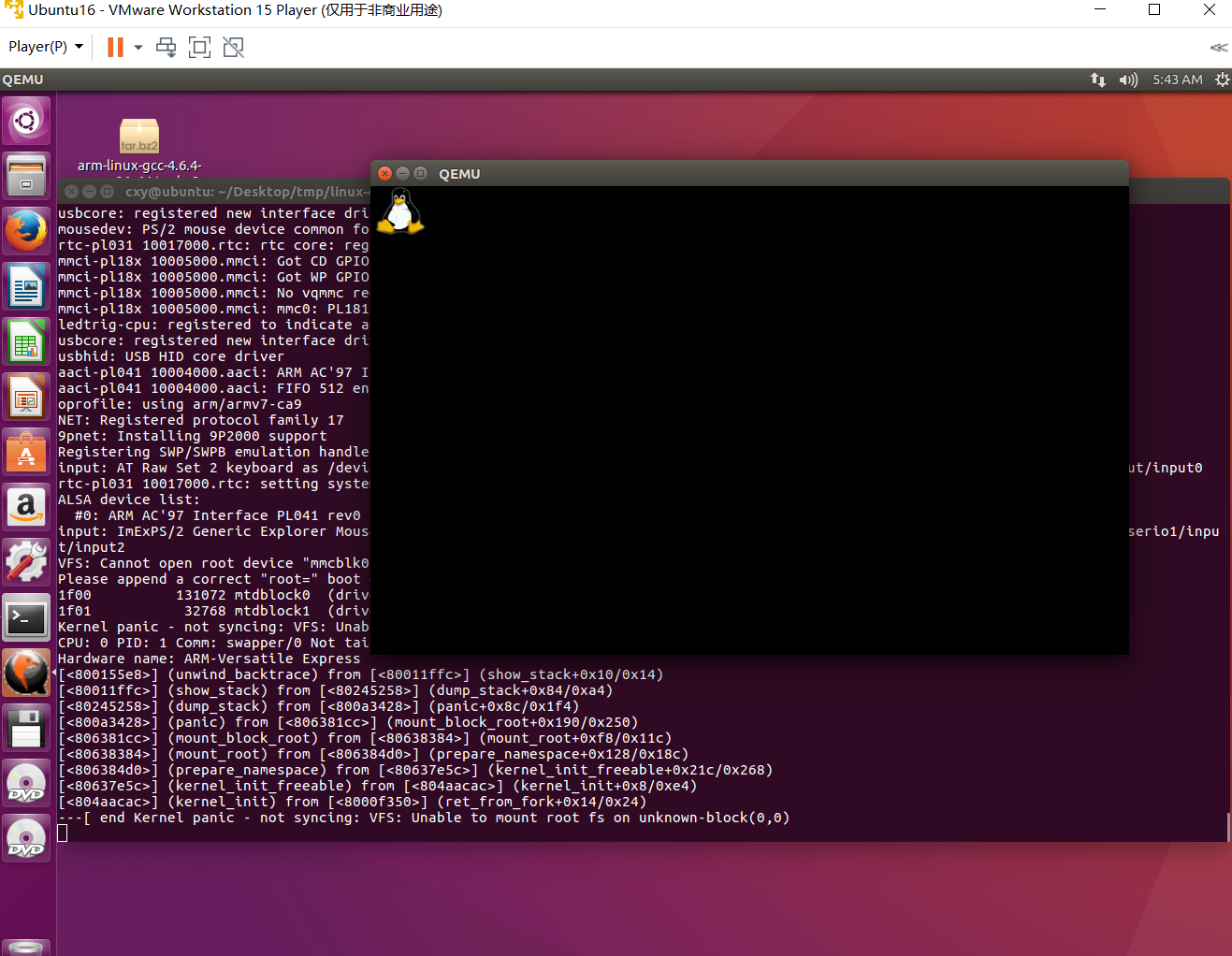
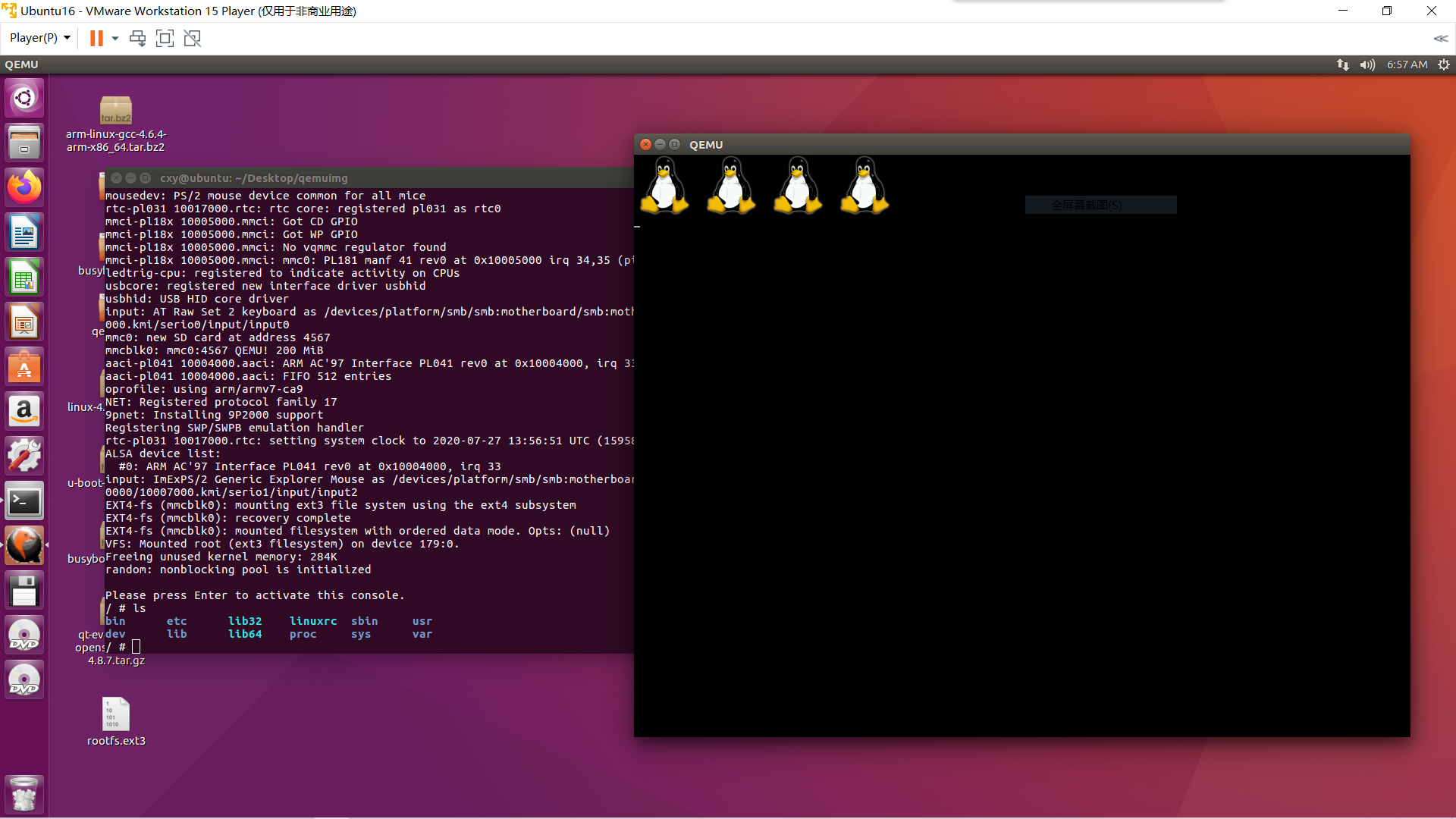
qemu-system-arm -M vexpress-a9 -m 1024M -kernel zImage -dtb vexpress-v2p-ca9.dtb -append “root=/dev/mmcblk0 rw console=ttyAMA0 init=/sbin/init” -sd rootfs.ext3 -smp 4 -serial stdio
启动成功,
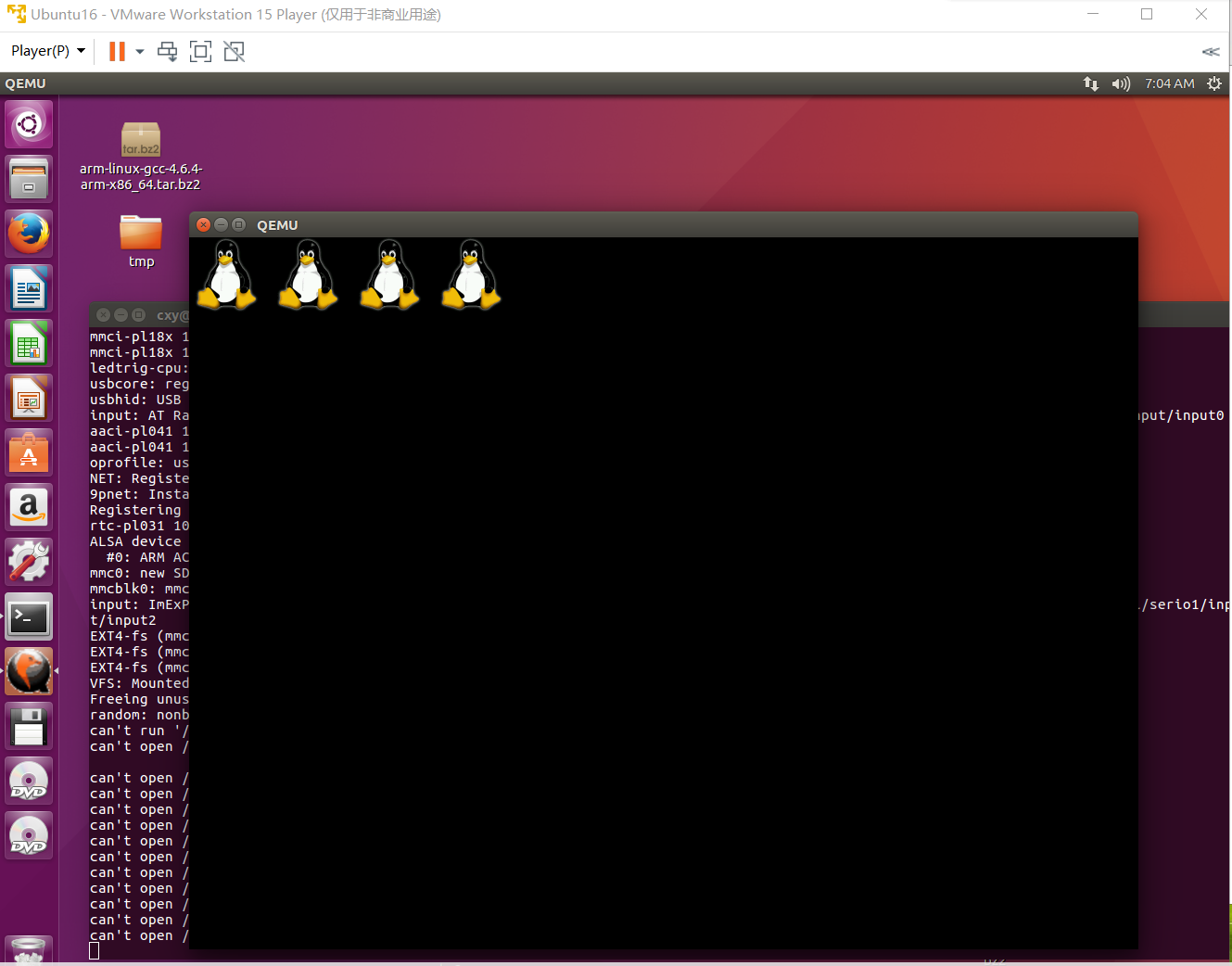
仔细看日志会发现:
can’t run ‘/etc/init.d/rcS’: No such file or directory
can’t open /dev/tty2: No such file or directory
can’t open /dev/tty4: No such file or directory
修改文件系统
从日志上看,加载文件系统已经成功了!但是启动/etc/init.d/rcS文件失败了,而且缺少/dev目录.所以我们需要稍微修改一下我们的文件系统
1 | sudo mount rootfs.ext3 mnt |
然后建立一个名为etc/init.d/rcS文件
1 |
|
给这个文件加上可执行权限,然后解除挂载
1 | sudo chmod +x etc/init.d/rcS |
再次启动文件系统
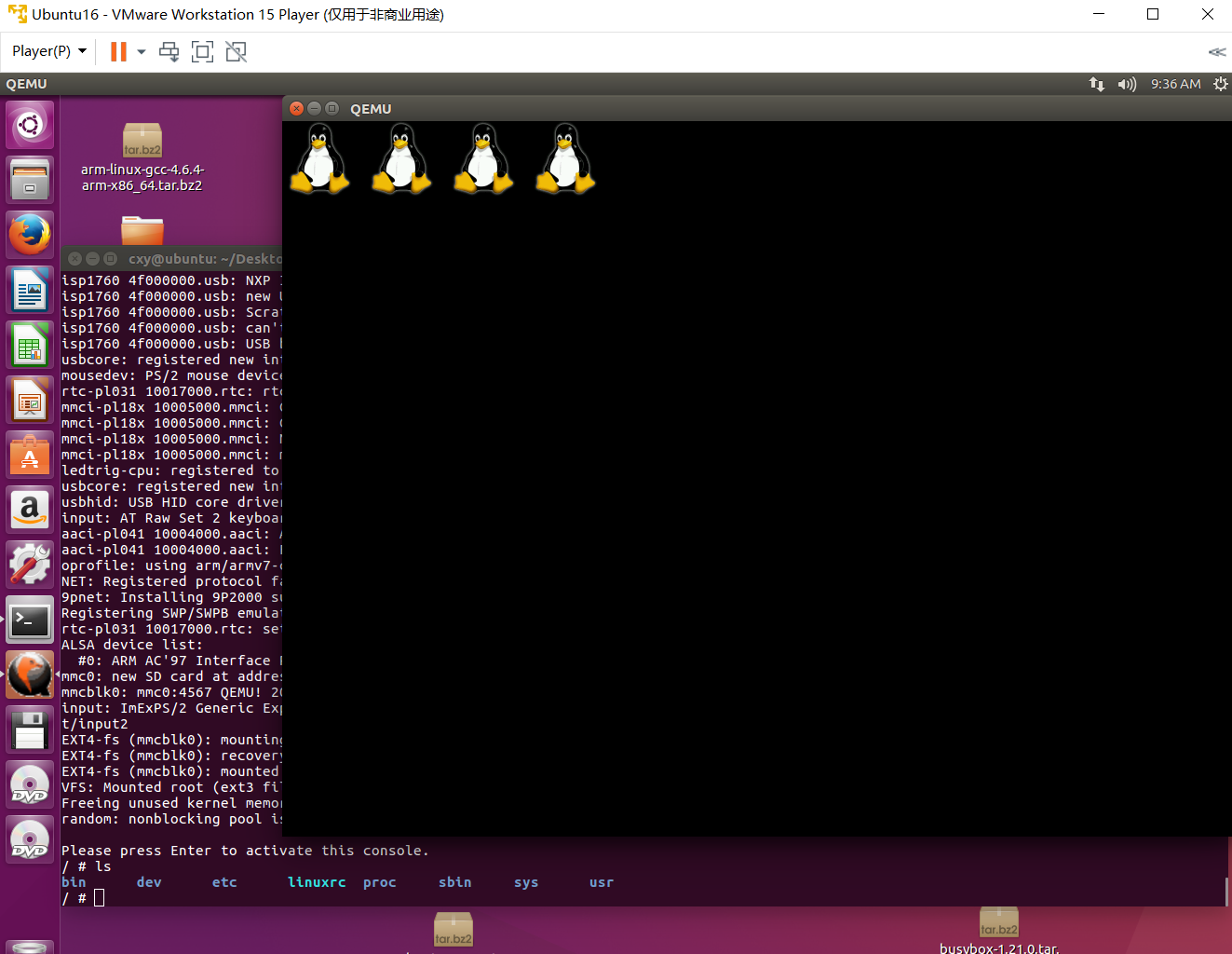
成功
qemu搭建arm开发环境2
准备
先对之前的步骤部分又执行了一遍
1 | "C:\Program Files\qemu\qemu-system-arm.exe" -M versatilepb -m 16 -kernel vmlinuz-qemu-arm-2.6.20 -append "clocksource=pit quiet rw" |
1 | "C:\Program Files\qemu\qemu-system-arm.exe" -M vexpress-a9 -m 1024M -kernel zImage -dtb vexpress-v2p-ca9.dtb -append "root=/dev/mmcblk0 rw console=ttyAMA0" -sd rootfsubuntu18lxde.ext3 -serial stdio -smp 4 |
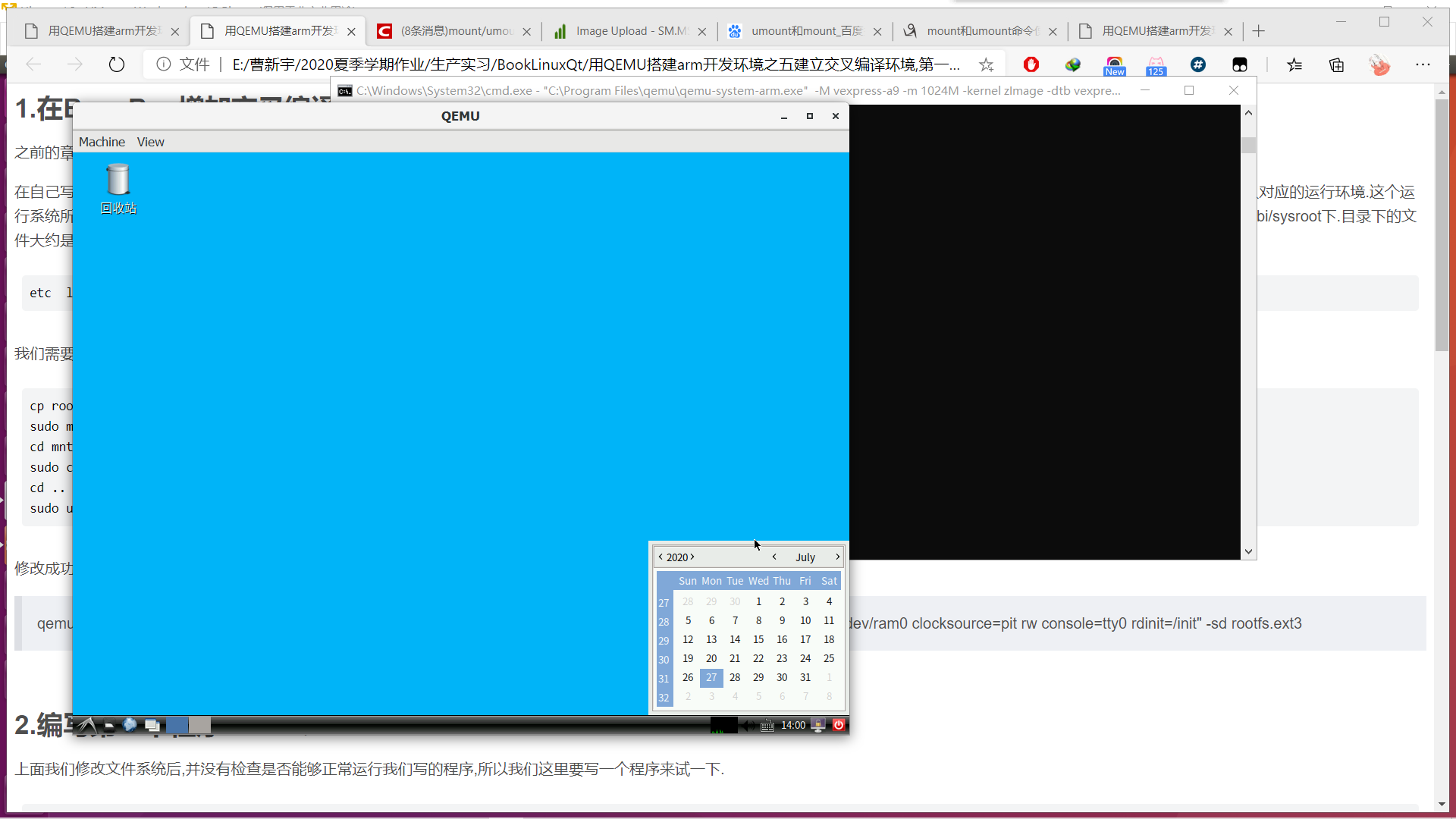
在Ubuntu的qemuimg文件夹运行
1 | qemu-system-arm -M vexpress-a9 -m 1024M -kernel zImage -dtb vexpress-v2p-ca9.dtb -append "root=/dev/mmcblk0 rw console=ttyAMA0 init=/sbin/init" -sd rootfs.ext3 -smp 4 -serial stdio |
第一步 建立交叉编译环境
一开始运行老师给的代码
结果错误,

后来GUO同学给了这个修改后的代码,运行正常。
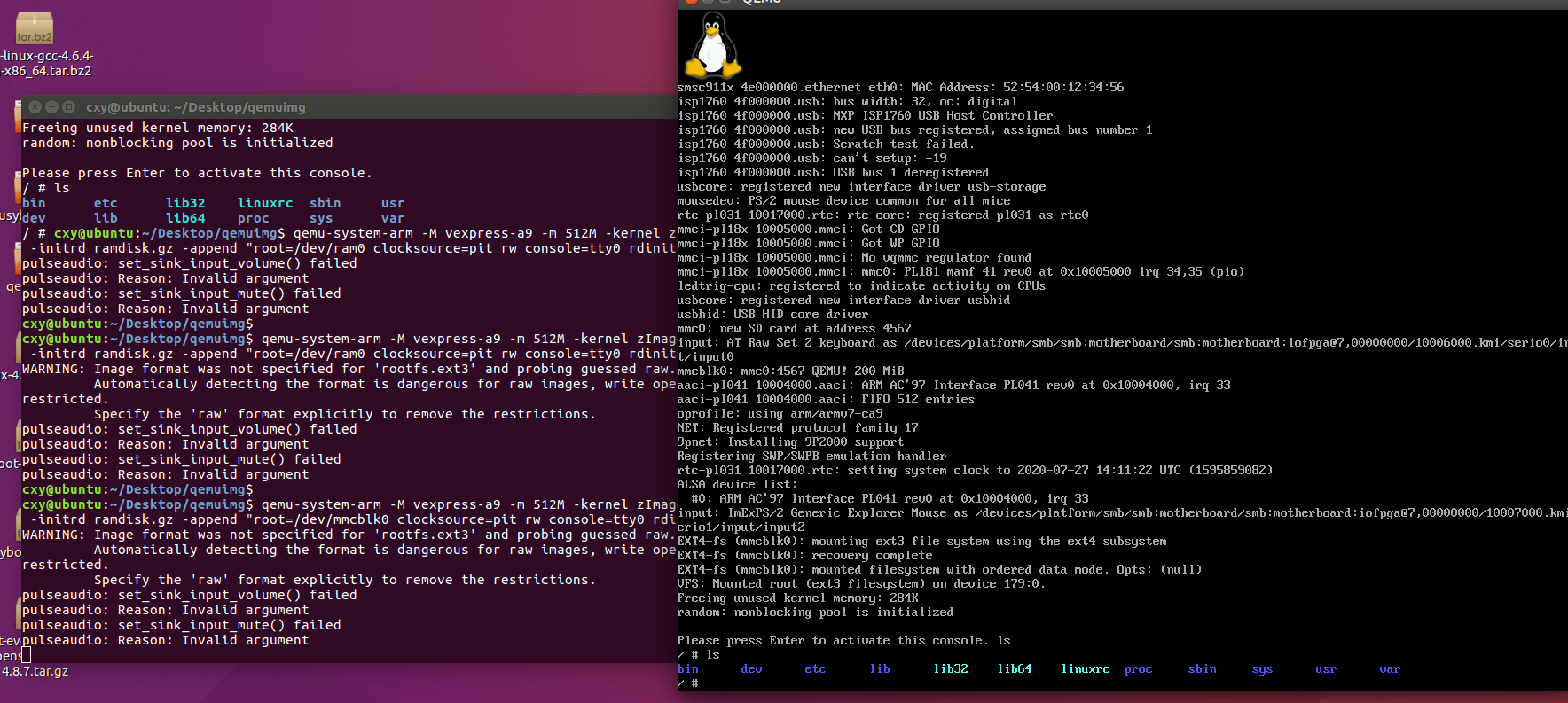
运行下面代码
1 | qemu-system-arm -M vexpress-a9 -m 512M -kernel zImage -dtb vexpress-v2p-ca9.dtb -initrd ramdisk.gz -append "root=/dev/mmcblk0 clocksource=pit rw console=tty0 rdinit=/init" -sd rootfs.ext3 |
结果:
用gcc编译helloworld
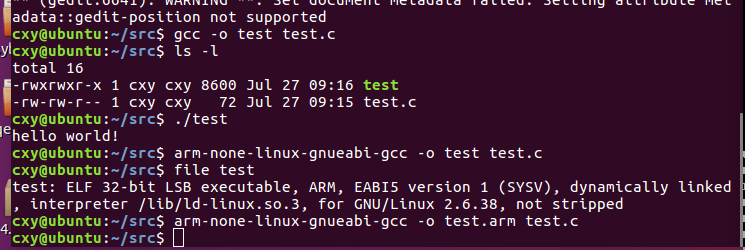
交叉编译时出错,umont不可用导致mnt卸载不了,文件不能更新
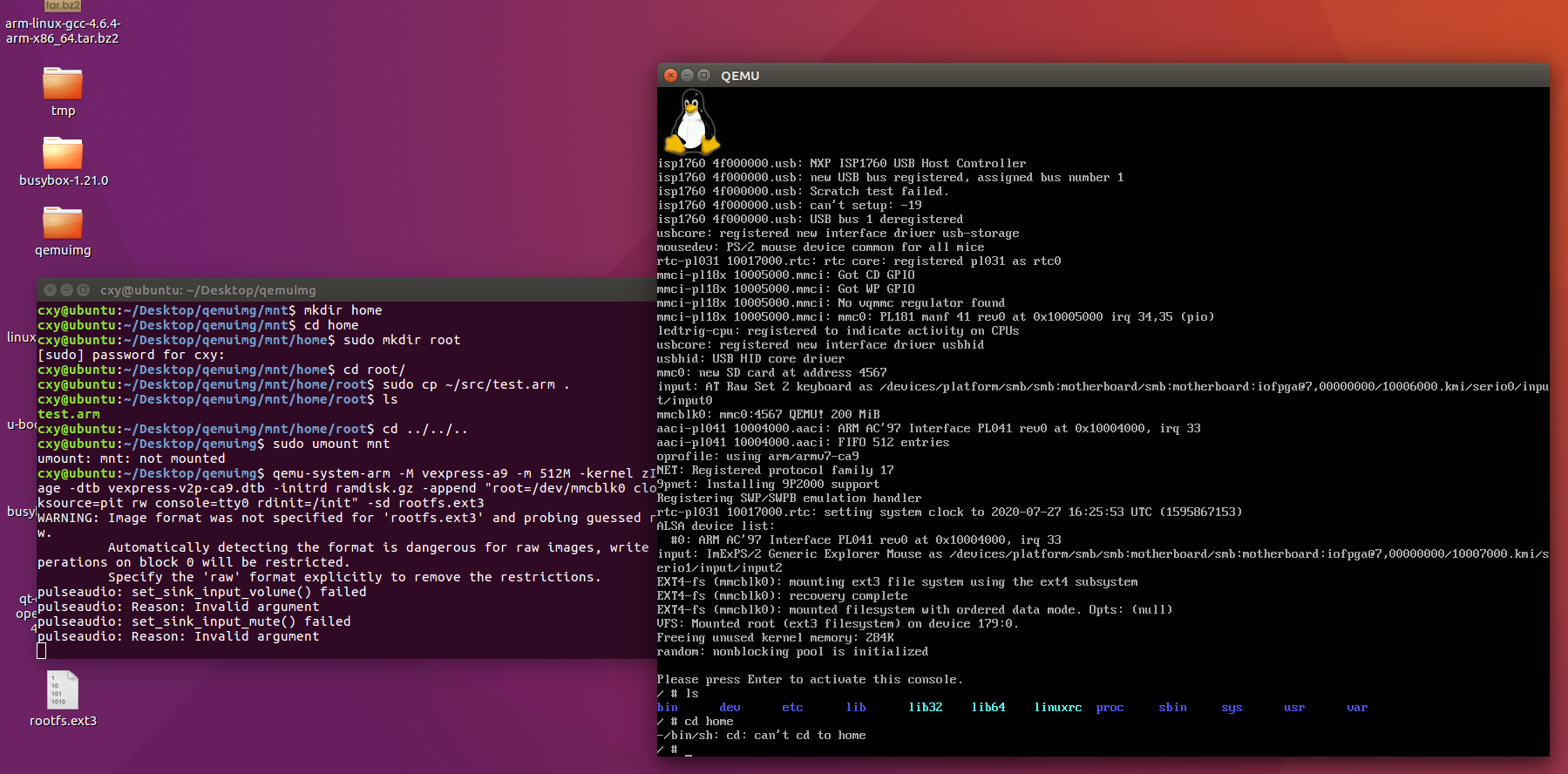
重新写了一下代码,进入mnt文件夹中
1 | sudo mkdir root |
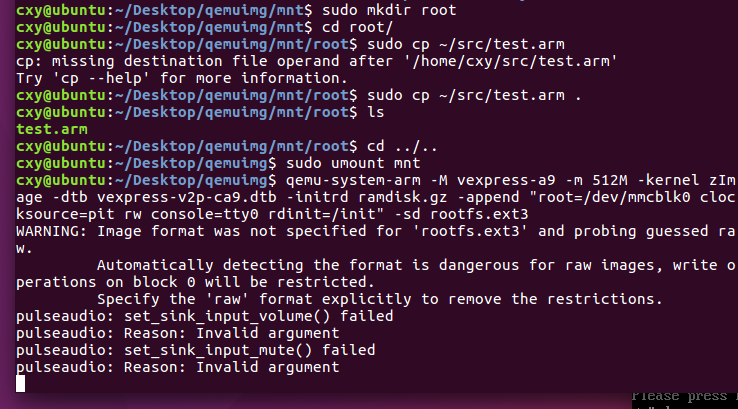
在弹出的界面进入root运行test.arm
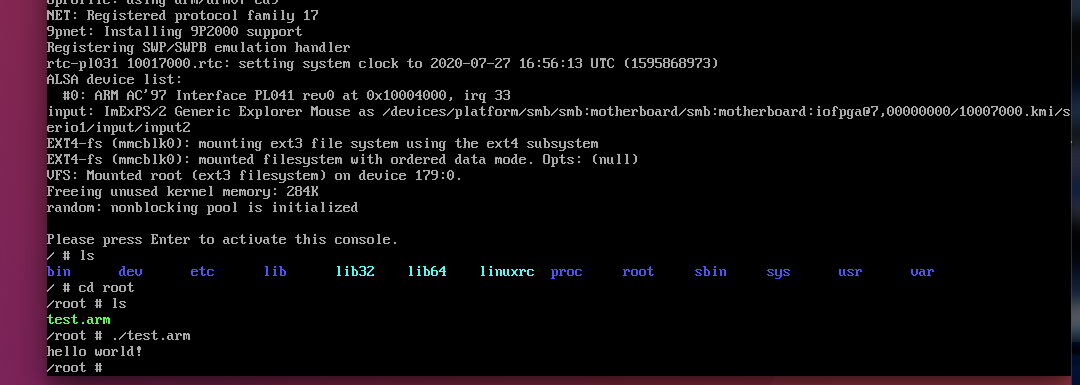
成功
交叉编译后的运行环境搭建成功.
第二步 下载并编译QT4
准备
下载
官方下载地址:https://download.qt.io/archive/qt/4.8/4.8.7/
也可以从这里下载:
解压,编译
1 | tar xvf qt-everywhere-opensource-src-4.8.7.tar.gz |
解压后
编译成功后
记住目录 (交叉编译器)
1 | /qws/linux-arm-gnueabi-g++ |
编译和安装开发环境
分别编译(make)和安装(make install)qt-4.8.7开发环境
分别执行
1 | make |
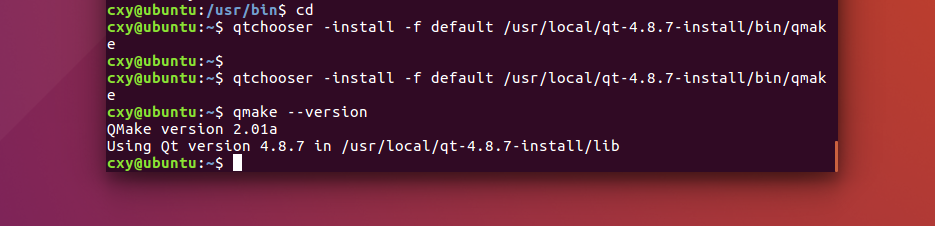
检查是否安装完成,查看版本
1 | qmake --version |
如果找不到qmake可能是环境变量没有配置:
老师又给错了
1 | export QMAKESPEC=/usr/local/qt-4.8.6-install/mkspecs/linux-arm-gnueabi-g++ |
正确的是
1 | export QMAKESPEC=/usr/local/qt-4.8.7-install/mkspecs/linux-arm-gnueabi-g++ |
如果你有多个qt版本,可以使用如下命令来切换你刚才安装的qt-4.8.7为默认版本
1 | qtchooser -install -f default /usr/local/qt-4.8.7-install/bin/qmake |
结果
.
.
.
qemu搭建arm开发环境
接上个文档
.
一开始就出现巨大问题,浪费了四五个小时,问题是路径找不到,可能是环境变量的设置问题
折腾了很长时间,问了两位同学,最后瞎整弄成功了,可以qmake 和 make了
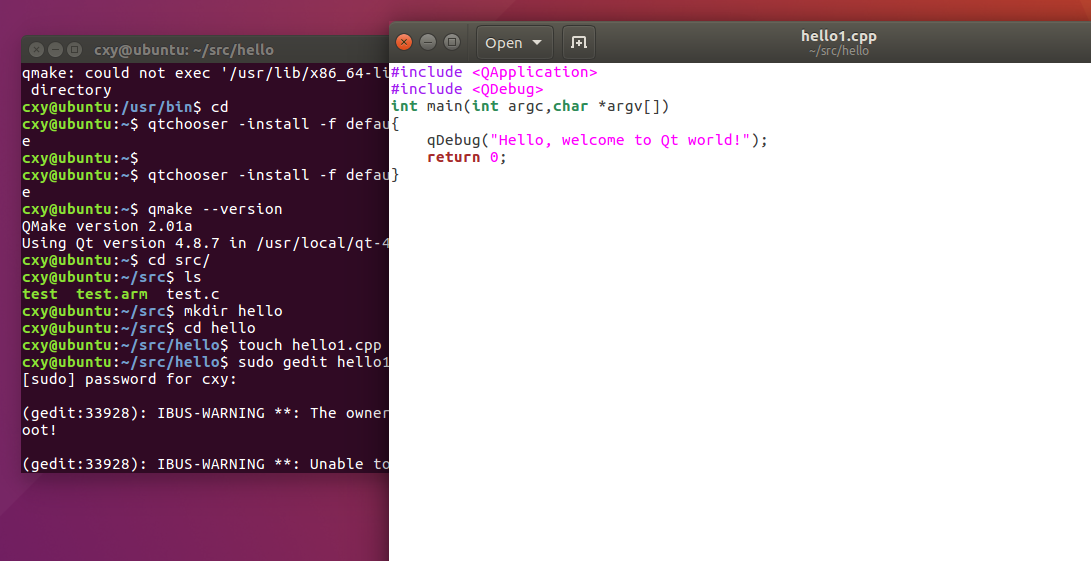
第三步 编写qt程序
编写hello
建立文件夹及文件
1 | mkdir src |
再将代码复制到cpp中
1 | #include <QApplication> |
完成
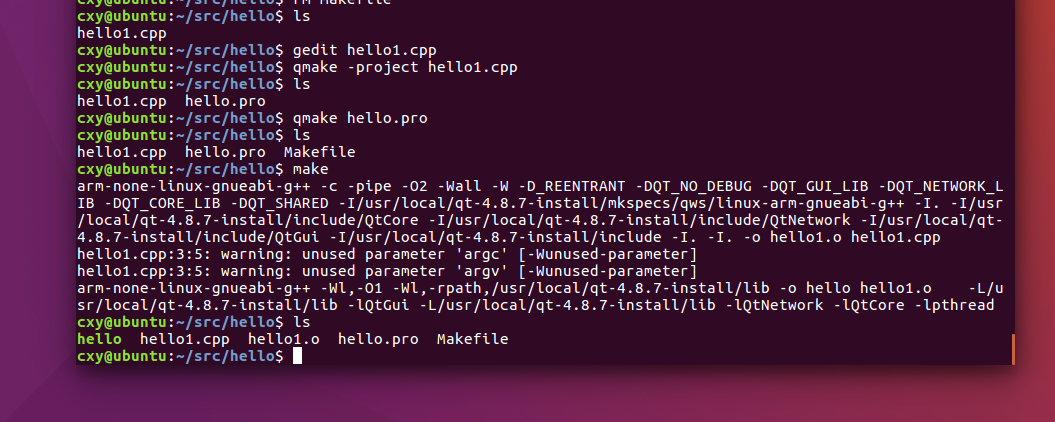
编译文件
输入qmake .make等等
1 | qmake -project hello1.cpp |
建立ui文件并编译
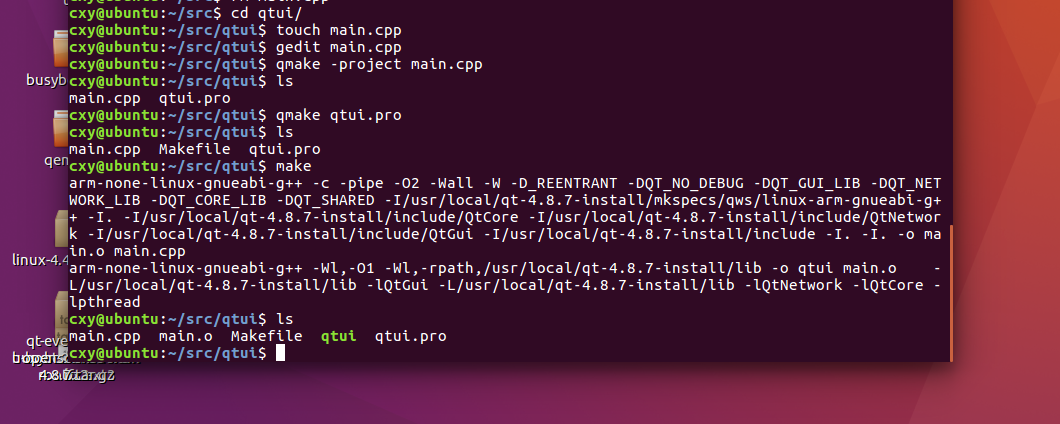
建立main.cpp
内容为
1 | #include<iostream> |
编译qtui文件
1 | qmake -project main.cpp |
实现如下图
第四步 在BusyBox文件系统下增加QT运行环境
创建文件系统
转载mnt并把环境cp进来
1 | sudo mount rootfsqt4.7.ext3 mnt |
将编译的文件cp到文件系统
如果没有文件夹则重新建
1 | mkdir home |
解除挂载,准备运行QEMU
在mnt上层文件夹中运行
sudo umount mnt
第五步
运行
1 | qemu-system-arm -M vexpress-a9 -m 512M -kernel zImage -dtb vexpress-v2p-ca9.dtb -initrd ramdisk.gz -append "root=/dev/mmcblk0 clocksource=pit rw console=tty0 rdinit=/init" -sd rootfs.ext3 |
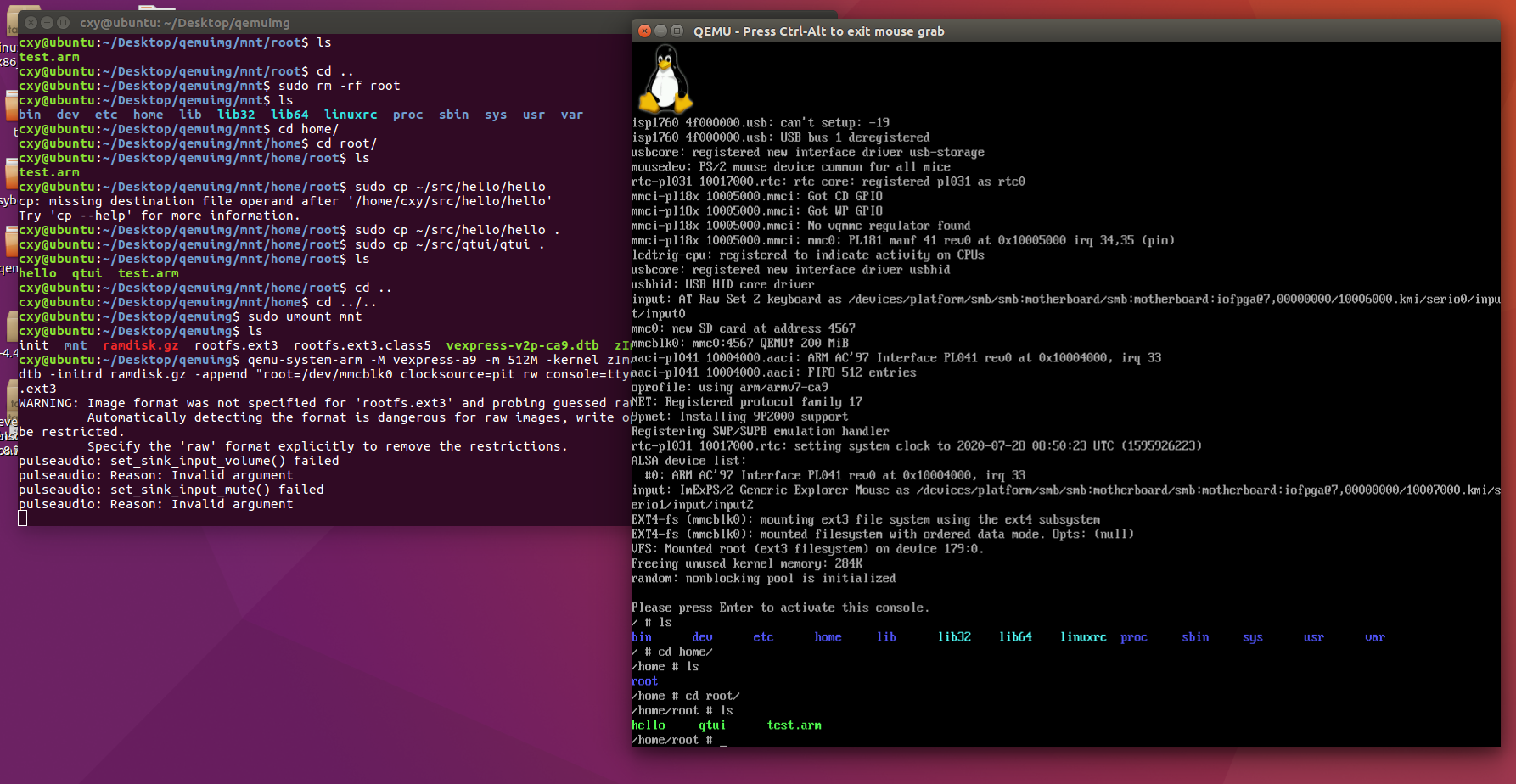
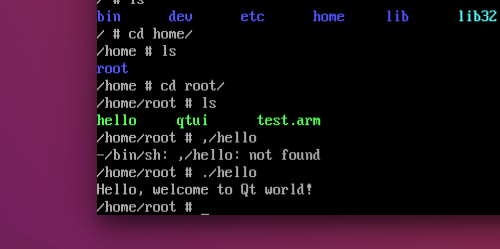
进入文件夹./hello运行qt程序hello
结果
执行./qtui -qws出现窗口
可能需要建立tmp文件夹
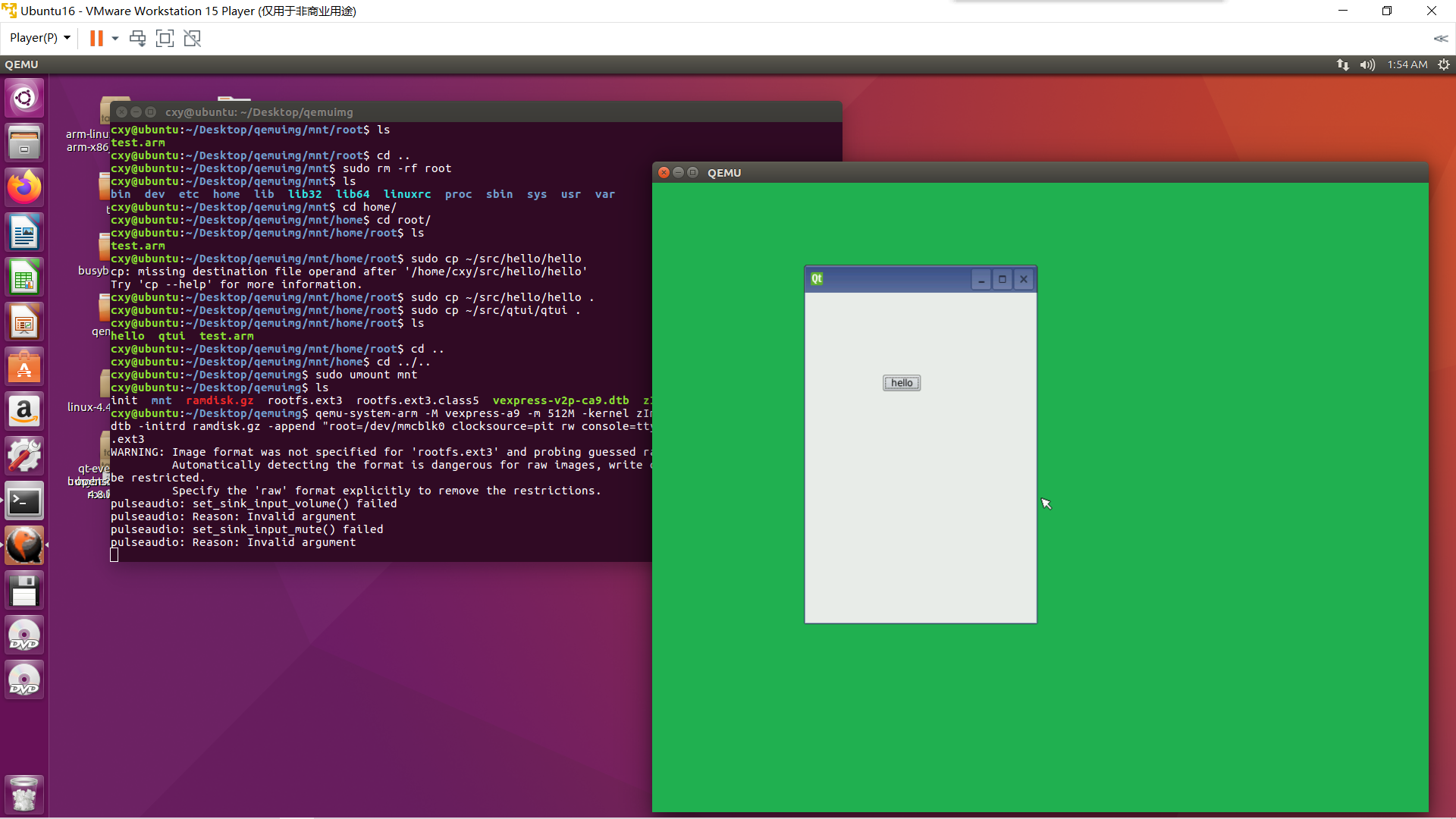
完成
HIT
曹新宇 19点13分
2020/7/28 安徽宿州